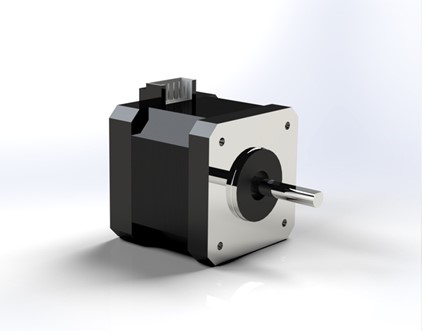
Ik ga gebruik maken van stappenmotoren genaamd NEMA 17 omdat ik dit op verschillende websites en heb gevonden en ook in de cursus dat je het beste de stappenmotor kan gebruiken voor een x-y beweging.
De stappenmotor is een DC motor die rondraaien in stappen, dus hij draait niet heel de tijd zoals de meeste motoren maar in heel kleine stapjes.
Per stap dat hij zet draait hij in een hoek van 1.8°, dit betekent dat hij 200 stappen moet zetten voor dat hij een volledige stap heeft gezet. Ze worden vooral gebruikt bij x-y bewegingen, daarom dat ik deze gekozen heb.
Elke keer dat de statorspoel een impuls krijgt zal hij een stap zetten in de juiste richting.
We hebben drie verschillende stappenmotoren: met een permanente magneet, met een variabele reluctantie en hybride.
Bij een permanente magneet is de rotor (het bewegende deel elektromotor) en de stator (het stilstaande deel van de elektromotor) niet getand.
De rotor heeft een noord en zuidkant. Als je de fase activeert zal de rotor zich uitlijnen met de bekrachtigde fase. Om de stapresolutie te vergroten kan je de polen in de stator of fasen verhogen.
Met een variabele reluctantie heeft een stappenmotor een getande niet magnetische rotor. Reluctantie staat voor magnetische weerstand. Als de fase bekrachtigd wordt zal de rotor zicht bewegen naar de kleinste reluctantie.
Om de resolutie te verhogen kan je het aantal tanden en fases verhogen. De hybride stappenmotor is degene die ook ga gebruiken. Dit is een combinatie van de twee vorige mogelijkheden.
Als de fase bekrachtigd wordt zal de rotor naar de positie bewegen waar er het minst plaats is tussen de tanden van de rotor en de stator.
De stator heeft 4 spoelen voor de stappenmotor die ik ga gebruiken. Hij kan er ook 8 hebben. De stappenmotor kan bipolair en unipolair zijn. Ik gebruik de bipolaire stappenmotor.
Bipolaire: stappenmotoren hebben 4 aansluitdraden. De NEMA 17 die ik gebruik kan allebei zijn. Bij een bipolaire stappenmotor staan de spoelen in serie.
Van de 4 draden gaat draad A1 naar binnen en komt met A2 terug naar buiten Dit is hetzelfde voor de andere twee draden. De draden bij een bipolaire stappenmotor kan je makkelijk uitmeten.
Je pakt een ohm-meter en wanneer hij een bepaalde waarde aangeeft weet je welke twee draden in verbinding zijn. De spanning staat meestal op de motor zelf, anders moet je hem bereken met 5V.
Er moet een driver tussen de motor en de microcontroller omdat stappenmotoren meer stroom trekken dan de 20mA van de pin van de microcontroller.
Microstepping kan gebruikt worden voor beide. Het is nauwkeuriger en kan alleen gebruikt worden met een bepaalde driver. Over de werking van de driver is er later meer uitleg. Bij microstepping zijn er minder schokjes omdat hij kleinere stappen zet.
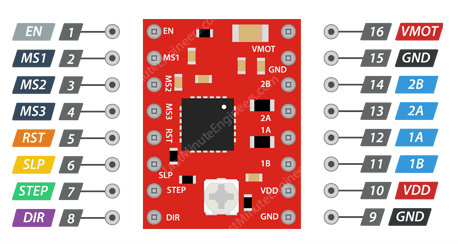
A4988 driver
Ik heb deze driver gekozen omdat ik deze nodig voor microstepping van de stappenmotor.
De driver heeft een motor output voltage van 8V-35V. De input is 3V-5.5V. De maximale stroom bedraagt 2A. De verschillende microstep resolutions zijn: full step, ½ ,1/4 ,1/8 ,1/16.
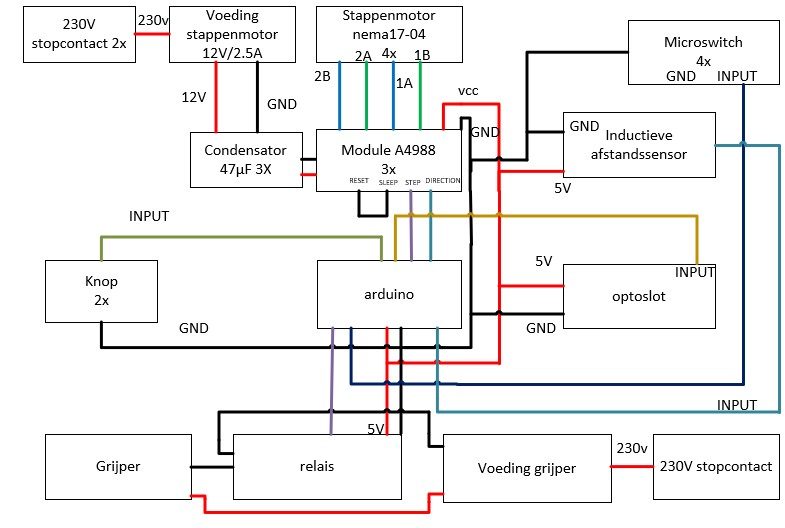
De VDD en de GND op pin 10 en 9 zijn voor de voeding van het logische interne circuit. De voeding die ik hiervoor gebruik is 5V. De VMOT en GND is voor de voeding van de motor de waarde hiertussen bedraagt 8V-35V.
Met de MS1, MS2, en de MS3 pin kunnen we 5 verschillende stappen zetten. Dit kan zijn een full, ½ ,1/4 ,1/8 ,1/16 step.
Vervolgens hebben we de STEP en DIR pin. De STEP pin gebruiken we voor wanneer er een puls wordt gestuurd naar deze pin een beweging maakt van 1.8°.
Dit kan je wel versnellen door sneller een puls te sturen. De DIR pin wordt gebruikt voor om de richting van de beweging te bepalen. Als je de DIR pin op HIGH zet zal hij wijzerzin draaien, als die LOW is zal hij tegenwijzerzin draaien.
Als je hem in 1 richting wil laten draaien kan je hem rechtstreekst aansluiten op de GND of de VCC.
De EN pin is voor de driver in te schakelen. Normaal is hij LOW en zal hij werken tenzij je hem HIGH zet. Je kan deze pin gebruiken voor een noodstop. De SLP is normaal een LOW input pin. Als de pin LOW is zal de driver in sleep modus gaan.
Je kan dit gebruiken voor energie te besparen. De RST is ook een normaal LOW pin. Als deze pin LOW is negeert die alle STEP inputs, hij reset dan ook de driver naar een home stand.
De 2B, 2A, 1A en 1B zijn de output pins waar de stappenmotor aan verbonden zal zijn. Elke pin geeft als output 2A. Voor de koeling van de driver gebruik een kleine ventilator met een voeding van 12V/2.5A.
Relais
Ik ge een relais gebruiken voor het schakelen van de stappenmotor.
Als eerste hebben we de ground pin deze wordt aangesloten op de ground output van de Arduino. Vervolgens hebben we de VCC. De VCC zal aangesloten worden op de 5V output van de Arduino. Dan hebben we de IN pin.
Deze zal verbonden met de Arduino. Deze pin is een actief lage pin, dus dit betekent dat als je deze laag trekt de relais zal activeren. Als je hem hoog zet zal het deactiveren.
Dan hebben we de drie output pins. De COM wordt gebruik voor het aansluiten van het apparaat dat je wil controleren. Dan hebben we de NC, de NC is een normaal gesloten contact dat verbonden is met de COM.
Maar als je de relais activeert zal hij onderbreken. NO aansluiting is een normaal open contact. Als je de relais activeert zal hij sluiten en is er contact tussen de COM en de NO. De werking van een relais gaar als volgt.
Als je de relais schakelt zal er een stroom door de spoel lopen die het contact zal sluiten. Als je de relais terug uitschakelt zal er geen stroom meer door de spoel lopen. Waardoor de contacten terug opengaan.
Maar hierdoor wordt er een grote inductieve spanning opgewekt. Deze inductieve spanning zal de transistor kapot maken. Maar daarvoor staat er een vrijloopdiode.
De vrijloopdiode zal dan in geluiding komen waardoor die grote inductieve spanning langs daar zal lopen en de transistor niet kapot gaat.
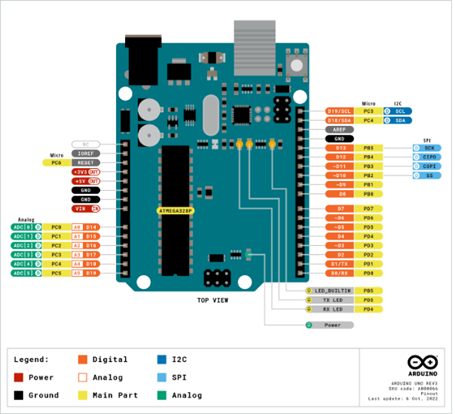
Arduino
Ik gebruik Arduino voor mijn project omdat dit programma al een beetje bekent is voor mij en dit ook het beste bij mijn componenten past.
Arduino heeft een speciale library voor de stappenmotor die ik gebruik.
De Arduino heeft een input spanning van 7-12V. Hij heeft 14 digitale I/O pins waarvan 6 met een PWM output. Met PWM kan je met een digitale input een motor analoog sturen. De arduino heeft ook 6 analoge pins.
Elke I/O pin levert een stroom van 20mA.
W Hij heeft een flash geheugen van 32KB, SRAM van 2KB en een EEPROM van 1KB. De kloksnelheid van een Arduino Uno r3 is 16MHz.
Condensator
Ik gebruik een condensator voor mijn project omdat, de voeding voor de stappenmotor die op de driver is aangesloten spanningsvallen zou hebben beschermt de condensator de driver hiertegen. Ik gebruik een condensator van 47µF.
Voeding van stappenmotor en grijper
Ik gebruik dezelfde voeding voor de grijper als voor de stappenmotor. Beide worden aangesloten de 230V van een stopcontact. Deze zal dan in de stekker getransformeerd worden naar 12V/2.5A.
Voor de stappenmotor is dit een groot genoeg vermogen dat geleverd wordt.
Voor de grijper heb ik geen specificaties meegekregen van hoeveel spanning ik hierop mag zetten. Ik heb dit uitgetest en een goede spanning kwam uit op 12V.
Op deze spanning zal de grijper hard genoeg toetrekken.
knoppen
Ik voor knoppen gekozen voor de grijper in plaats van een joystick. Ik heb dit gedaan omdat ik dit vaak heb gezien op een gewone kermis en ik dit idee zelf ook al had. Ik sluit de knop aan op de 5V van de Arduino en op de ground van de Arduino.
De knop zelf wordt ook aangesloten aan een input van de Arduino om de stappenmotor te laten draaien. Hiermee wordt bedoeld dat de stappenmotoren de x-y beweging kunnen maken. Ook wordt de knop gebruikt voor het laten zakken van de grijper.
grijper
Ik heb gekozen voor de grijper omdat ik een grijpmachine ga maken. Ik kon ook een ander soort grijper kiezen maar ik wou voor de tradionele grijper gaan.
Zoals eerder besproken sluit ik de grijper aan op een spanning van 12V.
Dit hebben we uitgetest. Maar achteraf de leerkracht die de grijper voor mij heeft geregeld heeft ook gezegd dat hij best op een spanning van 12V wordt aangesloten.
Dit wordt gedaan omdat wanneer er een hogere spanning wordt geleverd er een kans is dat de grijper kapot gaat.
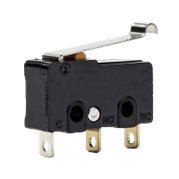
microswitch
Ik heb voor de microswitch gekozen zoals reeds verteld voor het aantal aansluitingen.
Ik ging eerst voor de afstand van de grijper zodat deze niet te ver kwam en de kast zou kapot maken HC-SR04 sensoren gebruiken.
Maar omdat dit per sensor twee aansluitingen nodig heeft heb ik gekozen voor de microswitch.
De grootste reden waarom ik deze gekozen heb was voor de montering.
Deze microswitch is veel gemakkelijker te monteren tegenover de HC-SR04 sensor.
De microswitch heeft drie aansluitingen waarvan de NO (normaal open), NC (normaal gesloten), COM (gemeenschappelijke aansluiting).
Voor mijn project gebruik ik de NO omdat wanneer de microswitch schakelt en het contact sluit. Hierdoor zal de stappenmotor stoppen met draaien.
inductieve afstandssensor
Ik heb voor de inductieve afstandssensor gekozen omdat ik een sensor had voor de grijper voor de z-beweging op tijd te laten stoppen.
De inductieve afstandssensor werkt volgens het principe van het detecteren van veranderingen in het magnetisch veld.
Wanneer er een metalen object in de nabijheid van de sensor komt, verstoort dit object het magnetische veld rond de sensor.
Dit veroorzaakt een verandering in de inductieve reactantie van de spoel in de sensor.
Door deze verandering te meten, kan de sensor bepalen of er een metalen object in de buurt is en op welke afstand het zich bevindt.
De sensor bestaat uit een spoel die omringd is door een ferromagnetische kern.
Wanneer er geen metalen object in de buurt is, wordt het magnetische veld rond de spoel vrijwel niet beïnvloed door de kern.
Dit resulteert in een hoge inductieve reactantie van de spoel.
Wanneer er een metalen object in de buurt komt, wordt het magnetische veld rond de spoel verstoord door de ferromagnetische kern en het metalen object.
Dit resulteert in een lagere inductieve reactantie van de spoel, die vervolgens kan worden gedetecteerd en gemeten door de elektronica van de sensor.
De sensor heeft een detectiebereik van maximaal 8 mm en is ontworpen om te werken met metalen objecten.
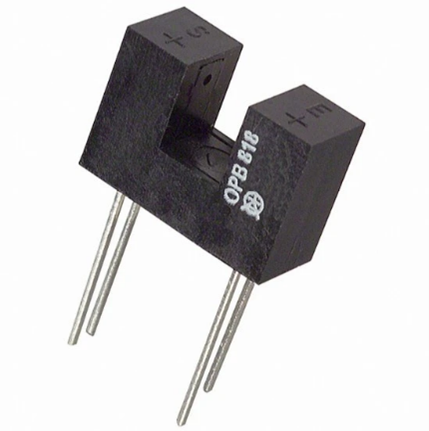
Optoslot
Een optoslot werkt aan de hand van een infraroodstraal. Een infraroodstraal zal schijnen naar de ontvanger. Wanneer de ontvanger het signaal niet meer krijgt betekent dat het onderbroken is geweest.
Dit gebruik ik voor mijn jeton de detecteren. Als de jeton in de machine wordt gestoken zal hij de infrarood straal onderbreken en daarmee een signaal geven.